
Asenkron Motor Çalışma Prensibi
Asenkron motor yapısının, en önemli hesaplanması gereken parametreleri moment (tork), hız veya devri, kontrol düzenekleri ve yol verme işlemleridir. Bu bölümde asenkron motor eşdeğer devresi, parametreleri, moment hesabı ve yol verme çeşitleri gösterilecektir.
Asenkron Motor Eşdeğer Devresi
Asenkron motorların çalışma ilkesi ve temel yapısı itibariyle transformatörlere benzediği için eşdeğer devresi transformatörlere çok benzerdir. Makinenin karmaşık yapısında primer ve sekonder sargılarındaki akan akımları, momenti, güç faktörünü, güç değerlerini, kayıpları hesaplamak amacıyla sadece bir fazın modelini çıkarmak ve bunun üzerinde hesaplarını yapmak daha kolaydır. Simetrik yapıya sahip asenkron motorlarda diğer fazlarında aynı modelin varlığı kabul edilerek hesaplamalar yapılır. T tipi ve L tipi olmak üzere iki türlü eşdeğer devre tipi vardır. Hesapların kolay yapılması sebebiyle genelde L tipi eşdeğer devre kullanılır. Asenkron motorların L tipi eşdeğer devresi aşağıdaki gibidir.

Burada Vo statora uygulanan gerilimi, I1 stator akımını, Rs stator direncini, Xs stator kaçak reaktansını, Rr rotor direncini, Xr rotor kaçak reaktansını, Im boşta çalışma akımını, Xm manyetik reaktansı, I2 rotor akımını ve E ise rotorda indüklenen akımı temsil etmektedir.
Asenkron motorlarda Im ile gösterilen boşta çalışma akımı, stator ile rotor arasında bulunan ince fakat büyük manyetik direnç gösteren hava aralıklarından dolayı transformatördekinden daha büyüktür. Çünkü transformatörde manyetik direnç gösteren yapı hava değil, silisli saclardan oluşan manyetik nüvedir.
Asenkron Motor Moment Hesabı
Asenkron motorun L tipi eşdeğer devreye göre moment formülü aşağıdaki gibidir.
![\[M\;=\frac{m.p}{2\mathrm{πf}}\frac{R_r^'}s\frac{V_1^2}{Z^2}\]](https://www.electricistanbul.com/wp-content/ql-cache/quicklatex.com-0905632e416c5aa48090319435cab005_l3.png "Rendered by QuickLaTeX.com")
Buradaki Z ile gösterilen eşdeğer devrenin L tipindeki empendasını ifade ederken, m faz sayısını, p kutup çifti sayısını, V1 ve f statora uygulanan gerilim ve frekansını göstermektedir.
Moment formülüne ve makinenin hızına göre asenkron motorun hız-moment grafiği aşağıdaki şekilde olur.
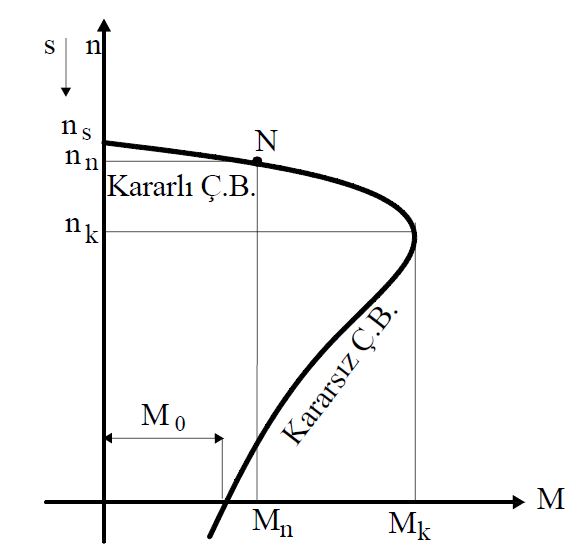
Grafiğe bakılacak olursa; motor senkron hızdayken (teoride mümkün olmayan) rotorun hızı sıfırdır. Motorun kalkınması için belli bir kalkış momenti (Mo) vardır. Bu durumda rotor hızı sıfırdır bunu motorun yenmesi gerekir ki motor kalkınsın ve dönmeye başlasın. Motor kalktıktan sonra belli bir hız değerinden sonra veriminin düştüğü görülmektedir. Yani devrilme momentini (Mk) aşmıştır. Makinenin devrilme momentini aşmaması gerekir. Bu durumdaki hızına devrilme hızı (nk), kaymasına ise devrilme kayması (sk) denir. Bu parametrelere göre moment formülünden devrilme momenti hesaplanır. Özetle asenkron motorlarda hız ayarı yapılırken veya yol verilirken kalkış momentini yenmesi ve devrilme momentini aşmaması gerekmektedir.
Asenkron Motorlara Yol Verme İşlemi
Durmakta olan motorun stator sargılarına gerilim uygulandığında rotor hareketsiz olduğundan indüklenen emk sıfırdır. Dolayısıyla ilk anda motorun eşdeğer devresi kısa devre durumundadır ve çekilen akım kısa devre akımıdır. Bu yüksek akımın rotor sargılarında yarattığı kuvvet ile üretilen momente yol verme momenti denir. Rotor bunun etkisiyle dönmeye başlar. Hızın artması ile indüklenen zıt emk artar ve şebeke gerilimine ters yönde olduğundan, başlangıçta çekilen büyük kısa devre akımı yavaş yavaş düşmeye başlar. Motorun miline bağlanmış ve sürülmekte olan herhangi bir iş makinesinin karşıt momenti (frenleyici momenti), motorun kendi ürettiği momente eşit olunca, motor ve iş makinesinden oluşan ikili sabit bir hızda dönmeye devam eder. Bu geçici işleme yol verme işlemi denir.

Yol verme sırasında şebekeden çekilen akımın büyük olması, şebekede geçici ve yüksek gerilim düşümlerinin meydana gelmesine, dolayısıyla gerilim dalgalanmalarına neden olur. Bu istenmeyen bir durumdur. Bunun yanı sıra bu akım, makine sargılarında yüksek kayıplara sebep olur. Sargı sıcaklığının yükselmesine neden olur ve bu durum motora zarar verebilir. Bu yüzden yol verme işlemini yaparken bu tip durumların göz önünde bulundurulması gerekir. Yol verme işleminde şebekeden çekilen akımın yüksek olmamasına ve yol verme işleminin çok kısa sürede tamamlanması gerekir. Aşağıda asenkron motorlara yol verme işlemlerinden bazıları gösterilmektedir.
- Oto-transformatör kullanmak
- Sargı bağlantısında yıldız/üçgen değişimi yapmak
- Akım sınırlayıcı bir direnç kullanarak yol vermek
- Derin oluk etkisinden yararlanmak
- Rotorda çift kafes kullanmak
- Bileziklere direnç bağlamak
- Yardımcı bir motor kullanmak
- Güç elektroniği düzenleri (sürücüler, yumuşak yol vericiler) kullanmak
Bu düzeneklerden en çok güç elektroniği düzenleri yani sürücüler (driver), yumuşak yol vericiler (soft starter) kullanmak ve yıldız üçgen yol vermek işlemleri kullanılır.
Elektrik Motorları: Asenkron Motor Kullanım Alanları
Elektrik motorları, mekanik hareket sağlamak için elektrik enerjisini dönüştüren cihazlardır. Asenkron motor, yaygın olarak kullanılan ve dayanıklı yapısıyla tanınan bir motor türüdür. Özellikle üç fazlı asenkron motor, endüstriyel uygulamalarda enerji verimliliği ve yüksek performans sunar. Bu motorların kontrolü için kullanılan asenkron motor sürücüleri ve asenkron motor sürücü devresi, motor hızını ve torkunu optimize etmek için kritik öneme sahiptir. Asenkron motorlar, hem monofaze asenkron motor gibi tek fazlı uygulamalar için hem de 3 fazlı asenkron motor gibi daha büyük sistemler için mevcuttur. 3 fazlı asenkron motor yıldız üçgen yol verme yöntemi, motorun ilk çalıştırma akımını düşürmek için kullanılan bir tekniktir. Ayrıca, redüktörlü asenkron motor modelleri, ağır yük uygulamalarında torku artırmak için kullanılır. Bunun yanında, kalıcı mıknatıslı senkron motor ve sabit mıknatıslı senkron motor gibi mıknatıslı motorlar, yüksek hassasiyet ve enerji tasarrufu gerektiren uygulamalarda öne çıkar. AC indüksiyon motoru, diğer adıyla indüksiyon motor, asenkron motorlar sınıfında yer alır ve dayanıklı yapısı sayesinde geniş bir kullanım alanına sahiptir.

Bir yanıt yazın